研发无人机自主避障和自稳控制系统,
使其能够在厂区内自主飞行并实现稳定悬停。该系统实时采集IMU(惯性测量单元)数据,采用改进ADRC(自抗扰控制)
控制算法实时解算出无人机的姿态并使无人机保持平衡;结合激光和光流的位置信息使无人机可稳定悬停于厂区内任一位置;
使用RGB-D(深度)相机感知周围环境,将连续环境模型转换成适合于所选路径规划算法的离散拓扑连通图,
随后在离散拓扑连通图上生成最优路径,完成避障和自主飞行。
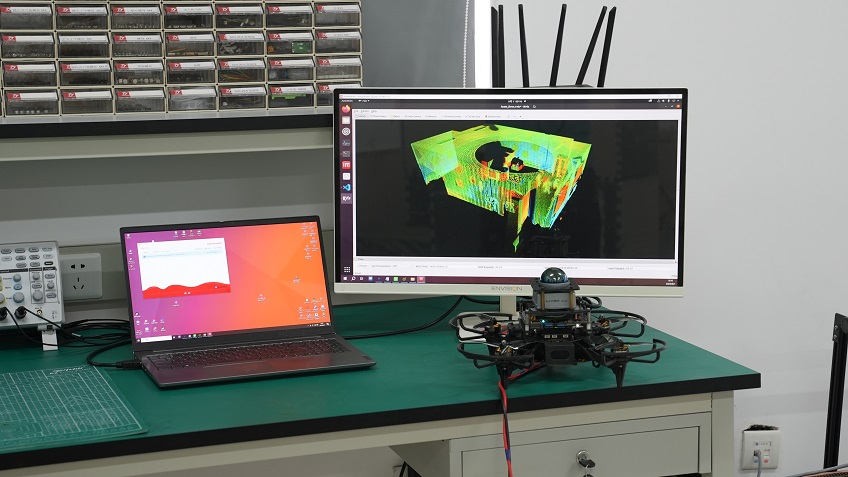
无人机搭载双目相机,利用SLAM获得周围环境的建图,完成厂区地图构建,同时实现无人机在该地图内的实时定位;
进行无人机集群的智能控制和轨迹优化,
使无人机集群能够高效地完成任务;实现无人机在厂区内的故障诊断(不限于视觉,声音,激光等),
并结合智能机器人完成智能维修机。